Artificial Intelligence, apabila diartikan ke dalam Bahasa Indonesia artinya adalah Kecerdasan Buatan. Bagaimanakah sesuatu disebut “cerdas”? Sejarah menceritakan ketika Perang Dunia ke 2, ilmuwan komputer Inggris, Alan Turing, bekerja untuk memecahkan kode 'Enigma' yang digunakan oleh pasukan Jerman untuk mengirim pesan dengan aman. Alan Turing dan timnya menciptakan mesin Bombe yang digunakan untuk menguraikan pesan Enigma. Mesin Enigma dan Bombe adalah dasar dari Machine Learning. Menurut Turing, sebuah mesin yang dapat berkomunikasi dengan manusia tanpa manusia mengetahui bahwa itu adalah mesin akan memenangkan "imitation game" dan bisa dikatakan "cerdas".
Namun, kita tidak pernah menyangka sesuatu yang ada di sekitar kita merupakan bagian dari Artificial Intelligence. Berikut ini adalah 5 contoh Artificial Intelligence yang “you may not know beforehand”.
1. Spotify Discover Weekly
Aplikasi spotify tidak asing bagi mereka pecinta musik. Ya, Spotify adalah layanan musik streaming, podcast dan video komersial Swedia yang menyediakan hak digital manajemen yang dilindungi konten dari label rekaman dan perusahaan media.Tidak disangka bahwa Spotify ini mengadaptasi teknologi Artificial Intelligence. Apa ya kira-kira? Tahun 2015, Spotify merilis Discover Weekly playlist yang menggabungkan rekomendasi lagu bahkan lagu yang tidak pernah dirilis sebelumnya melalui Deep Learning dan neural nets. Analisis yang dilakukan di dalamnya adalah mempelajari lagu yang telah didengarkan sebelumnya oleh pengguna Spotify. Berikut ini adalah cara kerja Discover Weekly

Lagu yang sering kita dengarkan dan disimpan dalam playlist akan direpresentasikan sebagai personal taste profile dan akan dikombinasikan dengan playlist orang lain dan memiliki kesamaan dengan personal taste profile kita. Lalu Spotify akan menemukan lagu yang belum pernah kita dengar dengan kategori playlist dalam akun Spotify kita.
Contoh lain adalah di bawah ini di mana genre lagu yang sering didengarkan adalah Funk/soul, Indie folk/rock, folk namun terdapat playlist lagu anak – anak milik Susie Tallman. Maka Susie Tallman akan dianggap sebagai outlier sehingga data Susie Tallman dengan genre lagu Kid’s songs tersebut tidak dipakai. Jadi makin mudah banget ya kalo jadi fans berat ga perlu susah – susah ngetik lagu barunya. Namun dilihat dari kelemahannya adalah Spotify ini akan memberikan informasi lagu – lagu yang sering kalian dengarkan. Apalagi kalau kalian tidak berlangganan, karena mekanisme untuk bisa mendengarkan lagu Spotify ini adalah kalian diharuskan posting ke akun sosial media kalian. So, it’s the matter of privacy leak. Tapi, di spotify ini dikembangkan private mode sehingga lagu – lagu yang tersimpan di private mode tidak akan menjadi bahan Spotify Discover Weekly kok 😊

2. Nudging Reminder Gmail
Pasti pernah ya lihat ada notifikasi dengan font warna warni di akun Gmail kalian seperti di bawah ini?

Jika kalian pernah,
nah itulah yang dinamakan fitur “nudging” yang dimiliki oleh Gmail. Nudge berfungsi
untuk melakukan follow-up kepada pemilik akun Gmail terhadap email yang masuk
dan D-I-A-B-A-I-K-A-N. Ya, diabaikan :D Dengan menggunakan AI, Gmail berupaya
menentukan mana email yang penting dan tidak penting. Hal ini dilatarbelakangi
dengan banyaknya spam dan notifikasi yang amat sangat banyak membuat email yang
penting terlewatkan.
Nudge didukung oleh algoritma cerdas yang mendeteksi konten email dan memisahkannya menjadi yang penting dan tidak penting. Nudge ini memiliki font style bold dan colorful, sehingga membuat user pertama melihatnya akan melirik dan mengidentifikasi email yang diabaikan tersebut. Artinya, jika pada suatu email yang masuk terdapat tanda nudge, maka email tersebut dikategorikan email yang penting dan membutuhkan perhatian. Pastinya memudahkan ya karena manusia tidak luput dari lupa :D
Nudge didukung oleh algoritma cerdas yang mendeteksi konten email dan memisahkannya menjadi yang penting dan tidak penting. Nudge ini memiliki font style bold dan colorful, sehingga membuat user pertama melihatnya akan melirik dan mengidentifikasi email yang diabaikan tersebut. Artinya, jika pada suatu email yang masuk terdapat tanda nudge, maka email tersebut dikategorikan email yang penting dan membutuhkan perhatian. Pastinya memudahkan ya karena manusia tidak luput dari lupa :D
Tapi, nudge ini
memiliki kelemahan lho, karena berpotensi mengganggu pengguna Gmail alias “irritating”
sodara sodara. Why is it so? Karena nudge ini belum tahu keinginan kita apakah
kita ingin membalas email yang masuk tersebut atau tidak, sehingga tidak semua
nudge yang dikirimkan oleh Gmail selaras dengan keinginan kita untuk membalas. Yea,
it’s about comfort.
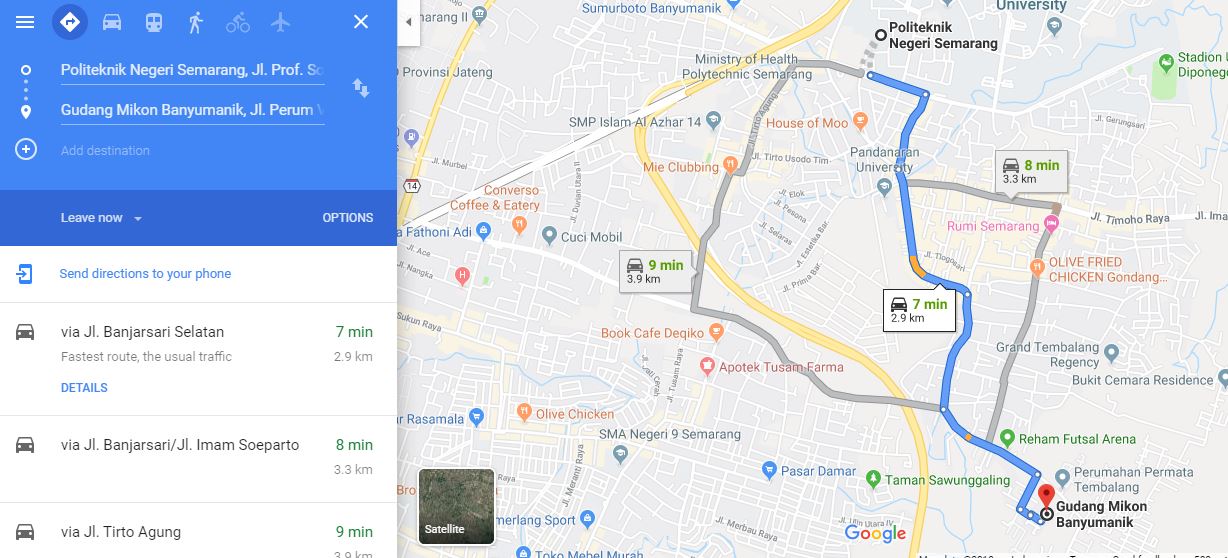
3. Maps and Direction Google Maps
Kecerdasan yang ada di Google Maps adalah ketika Google Maps dapat menghitung traffic dan konstruksi dengan tujuan untuk menemukan rute tercepat ke alamat yang dituju. Pada contoh di bawah, Google Maps menawarkan arahan berdasarkan rute tercepat sesuai dengan lalu lintas yang biasa dilalui. Bagian oranye rute menunjukkan di mana lalu lintas lebih lambat. Teknologi inilah yang kemudian digunakan oleh Nadiem Makarim, CEO GOJEK dalam mendukung pencarian rute perjalanan driver.
Issu kelemahan yang
ada pada Google Maps ini adalah pada privacy. Juru bicara Google mengaku
terkadang mereka mendapatkan laporan gambar tidak layak dari para pengguna
Google Maps, terutama di area streetview. Hal ini tentu saja yang
berkaitan dengan area-area yang sangat akurat. Namun masalahnya camera merekam
ketika banyak kejadian-kejadian yang seharusnya tidak dilihat ataupun dirasa
kurang sesuai. Google yang secara rutin memantau laporan penggunaan akan segera
menangani keluhan tersebut.
4. Turnitin
Berkaitan dengan
pentingnya publikasi di perguruan tinggi, maka artikel ilmiah amatlah krusial
untuk diperhitungakan keorisinilannya agar diketahui apakah terdapat unsur plagiarism
didalamnya karena tentu saja hal tersebut melanggar kode etik dalam keilmuan. Orisinil
atau tidaknya suatu ilmiah dapat dicek melalui plagiarism checker yang akrab
dengan layanan seperti Turnitin, alat populer yang digunakan untuk menganalisis
tingkat kesamaan penulisan artikel ilmiah.
Teknologi AI dalam Turnitin
ini adalah Machine Learning. Kunci algoritmik untuk plagiarisme adalah fungsi
kesamaan, yang menghasilkan perkiraan numerik tentang seberapa mirip dua dokumen
tersebut. Fungsi kesamaan optimal tidak hanya akurat dalam menentukan apakah
dua dokumen serupa, tetapi juga efisien dalam melakukannya. Pencarian brute
force yang membandingkan setiap string teks dengan setiap string teks
lainnya dalam database dokumen akan memiliki akurasi yang tinggi, tetapi
terlalu mahal secara komputasi untuk digunakan dalam praktiknya.

5. ALEXA
ALEXA adalah voice assistant yang merupakan bagian
dari Artificial Intelligence. ALEXA ini adalah produk keluaran dari Amazon. AI
yang diterapkan di ALEXA ini adalah neural networks dan machine learning. ALEXA
dapat melakukan control di dalam rumah seperti untuk menyalakan atau mematikan
lampu melalui speech recognition. Selain
itu juga dapat dapat memutar lagu hanya dengan cara memanggil seperti ini, “ALEXA,
play Back to December Taylor Swift”, maka selanjutnya ALEXA akan mencari
playlist tersebut dan akan memainkannya. Bisa juga lho untuk tahu jam berapa
ini ya..
Selain itu, ALEXA juga dapat membantu memudahkan manusia, contohnya mengerjakan
PR :D
Contohnya di bawah ini! Kreatif sih, tapi….pinter juga
yah aha. Ya begitulah teknologi, memudahkan yang susah wkwk.
But still, ALEXA punya kelemahan guys. Alexa tidak dapat
menyimpulkan konteks percakapan, jadi ALEXA hanya dapat membaca 1 kalimat saja,
makanya kalo mau pake ALEXA, ga usah bertele-tele, to the point aja. Dia gak
suka yang ribet-ribet wkwk. Nah, yang satu ini, Alexa tidak bisa memahami
berbagai aksen. Untuk melatih mesin mengenali ucapan, kamu perlu banyak sampel
audio karena AI Cuma dapat mengenali apa yang telah dilatihnya untuk didengar.
Fleksibilitasnya tergantung pada keragaman aksen yang dikenalkan ke ALEXA.
Sumber:
Sumber:
Yaaa, jadi gitu tuh AI yang ada di sekitar kita. Boleh
comment di bawah ini yaa atau kalau ada pertanyaan juga bisa tuh share ke sini
sambil jawab sambil belajar. Oke, bosku?














